Other way to look at rotation
Roll, Pitch, Yaw
Imagine three lines running through an airplane and intersecting at right
angles at the airplane's center of gravity.
ROLL |
PITCH |
YAW |
 |
 |
 |
Rotation around the front-to-back |
Rotation around the side-to-side axis |
Rotation around the vertical axis |
 |
 |
 |
Euler Angles
written by Ian Humphrey <I.Humphrey@sct.gu.edu.au>
The Euler Angles (a, b, g) comprise a parametrisation
of arbitrary rotations in three-dimensional space.
The description in this document coincides with that of "Angular Momentum
in Quantum Mechanics" by Edmonds and "Angular Momentum" by Brink
and Satchler, two standard texts in the field.
The effect of Euler angle rotation R=(a, b, g) is briefly
as follows:
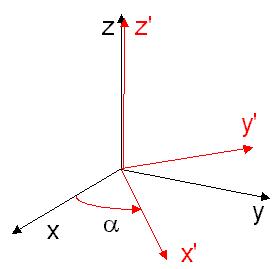
1. We start in frame S with cartesian axes, x, y and z.
2. We begin with a positive (anti-clockwise) rotation of magnitude a about the
z axis of S. The resulting frame is called S'.
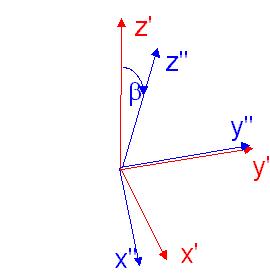
3. Next a positive rotation of magnitude b about the y' axis of frame S'. The
resulting frame is called S''.
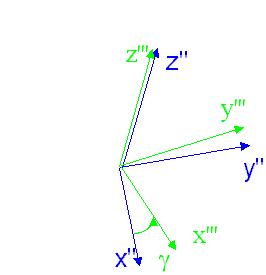
4. Finally a positive rotation of magnitude g about the z'' axis of S''. The
resulting frame is called S'''.
the phycist definition :
STEP 1:
|
STEP 2:
|
STEP 3:
|
 |
 |
 |
Quaternions.